

[ad_1]
Google Analysis
On Monday, a gaggle of AI researchers from Google and the Technical College of Berlin unveiled PaLM-E, a multimodal embodied visual-language mannequin (VLM) with 562 billion parameters that integrates imaginative and prescient and language for robotic management. They declare it’s the largest VLM ever developed and that it could actually carry out quite a lot of duties with out the necessity for retraining.
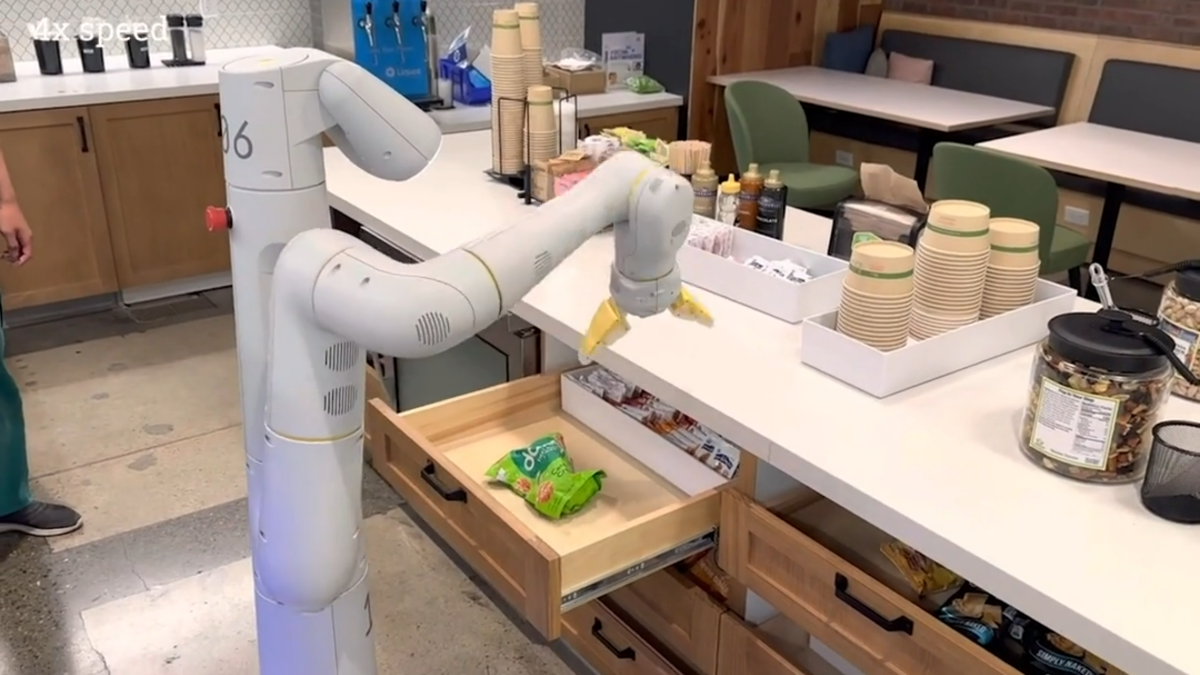
In accordance with Google, when given a high-level command, corresponding to “carry me the rice chips from the drawer,” PaLM-E can generate a plan of motion for a cell robotic platform with an arm (developed by Google Robotics) and execute the actions by itself.
PaLM-E does this by analyzing knowledge from the robotic’s digital camera while not having a pre-processed scene illustration. This eliminates the necessity for a human to pre-process or annotate the info and permits for extra autonomous robotic management.
In a Google-provided demo video, PaLM-E executes “carry me the rice chips from the drawer,” which incorporates a number of planning steps in addition to incorporating visible suggestions from the robotic’s digital camera.
It is also resilient and may react to its atmosphere. For instance, the PaLM-E mannequin can guide a robot to get a chip bag from a kitchen—and with PaLM-E built-in into the management loop, it turns into proof against interruptions which may happen throughout the activity. In a video instance, a researcher grabs the chips from the robotic and strikes them, however the robotic locates the chips and grabs them once more.
In another example, the identical PaLM-E mannequin autonomously controls a robotic via duties with advanced sequences that beforehand required human steerage. Google’s research paper explains how PaLM-E turns directions into actions:
We show the efficiency of PaLM-E on difficult and numerous cell manipulation duties. We largely observe the setup in Ahn et al. (2022), the place the robotic must plan a sequence of navigation and manipulation actions based mostly on an instruction by a human. For instance, given the instruction “I spilled my drink, are you able to carry me one thing to wash it up?”, the robotic must plan a sequence containing “1. Discover a sponge, 2. Choose up the sponge, 3. Convey it to the consumer, 4. Put down the sponge.” Impressed by these duties, we develop 3 use circumstances to check the embodied reasoning skills of PaLM-E: affordance prediction, failure detection, and long-horizon planning. The low-level insurance policies are from RT-1 (Brohan et al., 2022), a transformer mannequin that takes RGB picture and pure language instruction, and outputs end-effector management instructions.
PaLM-E is a next-token predictor, and it is referred to as “PaLM-E” as a result of it is based mostly on Google’s current giant language mannequin (LLM) referred to as “PaLM” (which has similarities to the know-how behind ChatGPT). Google has made PaLM “embodied” by including sensory data and robotic management.
Because it’s based mostly on a language mannequin, PaLM-E takes steady observations, like photographs or sensor knowledge, and encodes them right into a sequence of vectors which are the identical measurement as language tokens. This permits the mannequin to “perceive” the sensory data in the identical manner it processes language.
A Google-provided demo video exhibiting a robotic guided by PaLM-E following the instruction, “Convey me a inexperienced star.” The researchers say the inexperienced star “is an object that this robotic wasn’t straight uncovered to.”
Along with the RT-1 robotics transformer, PaLM-E attracts from Google’s earlier work on ViT-22B, a imaginative and prescient transformer mannequin revealed in February. ViT-22B has been educated on numerous visible duties, corresponding to picture classification, object detection, semantic segmentation, and picture captioning.
Google Robotics is not the one analysis group engaged on robotic management with neural networks. This explicit work resembles Microsoft’s current “ChatGPT for Robotics” paper, which experimented with combining visible knowledge and enormous language fashions for robotic management in an identical manner.
Robotics apart, Google researchers noticed a number of attention-grabbing results that apparently come from utilizing a big language mannequin because the core of PaLM-E. For one, it reveals “optimistic switch,” which suggests it could actually switch the information and expertise it has realized from one activity to a different, leading to “considerably greater efficiency” in comparison with single-task robotic fashions.
Additionally, they observed a development with mannequin scale: “The bigger the language mannequin, the extra it maintains its language capabilities when coaching on visual-language and robotics duties—quantitatively, the 562B PaLM-E mannequin practically retains all of its language capabilities.”
PaLM-E is the most important VLM reported up to now. We observe emergent capabilities like multimodal chain of thought reasoning, and multi-image inference, regardless of being educated on solely single-image prompts. Although not the main target of our work, PaLM-E units a brand new SOTA on OK-VQA benchmark. pic.twitter.com/9FHug25tOF
— Danny Driess (@DannyDriess) March 7, 2023
And the researchers claim that PaLM-E reveals emergent capabilities like multimodal chain-of-thought reasoning (permitting the mannequin to research a sequence of inputs that embody each language and visible data) and multi-image inference (utilizing a number of photographs as enter to make an inference or prediction) regardless of being educated on solely single-image prompts. In that sense, PaLM-E appears to continue the trend of surprises rising as deep studying fashions get extra advanced over time.
Google researchers plan to discover extra purposes of PaLM-E for real-world situations corresponding to dwelling automation or industrial robotics. They usually hope PaLM-E will encourage extra analysis on multimodal reasoning and embodied AI.
“Multimodal” is a buzzword we’ll be listening to increasingly more as firms reach for artificial general intelligence that may ostensibly be capable of carry out basic duties like a human.
[ad_2]
Source link







{kind=link}
{kind=link}